ЭНЕРДЖИНЕТ.КОСМОС
УДК 004.8 + 06
DOI 10.57112/E231-709
Билецкая Софья Николаевна, Пелипенко Роман Андреевич
Аннотация:
В данной статье исследуется возможность разработки реалистичной и научно обоснованной программы по созданию искусственного интеллекта (ИИ) в Солнечной системе, начиная с массированного исследования и первоначального освоения Марса. Авторы предлагают создание долговременной станции на спутнике Марса - Деймосе или на орбите вокруг Марса, а также мощного межпланетного буксира с большими возможностями использования. Статья рассматривает вопросы выбора места для пилотируемой станции, организации связи и управления, а также основные требования к станции, экипажу и снабжению. Предлагается формирование перечня предварительных мероприятий конструкторско-исследовательского характера на Земле, Луне и ближайших астероидах. Авторы также рассматривают некоторые этапы миссии, которые должны привести к платформе ИИ в окрестностях Марса и другие проблемы освоения космического пространства в пределах Солнечной системы связанные с энергетическим базисом.
Ключевые слова: космическая станция, Марс, система, Земля, орбита, экипаж, планета, спутник, астероид, робот, топливо, жизнеобеспечение, человечество, интеллект, энергия, гравитация.
Введение
Широкомасштабное освоение Солнечной системы человечеством вряд ли возможно исключительно пилотируемыми средствами. Наличный опыт говорит, что беспилотные миссии всегда предшествуют пилотируемым. Нет никаких сколько-нибудь веских причин утверждать, что и в будущем ситуация измениться. Кроме того, современные подходы и накопленный опыт базирующийся на создании кластеров искусственного интеллекта для решения конкретных задач в различных сферах жизни открывает для земной цивилизации колоссальные перспективы в космосе, вплоть до посылки исследовательских миссий к ближайшим звездам.
Поэтому встает задача создания и поэтапного воспитания космического кластера искусственного интеллекта (ИИ) - сетевой энергоинформационной, долгоживущей и материально самодостаточной структуры, базирующейся на множестве объектов Солнечной системы. Слово «воспитание» тут следует понимать во первых как задачу накопление космическим кластером ИИ опыта космической деятельности, опыта генерации творческих решений в различных аспектах в целях его деятельности в целях удовлетворения интересов человечества в ближнем и дальнем космическом пространстве, а во вторых делом ИИ Солнечной системы должна стать задача сохранения опыта и знаний всего человечества, а так же генетического и биологического материала с целью восстановления жизни или в рамках нашей Солнечной системы или, в отдаленной перспективе, в рамках какой то иной солнечной системы. На данный момент понятно, что жизнь на нашей планете подвержена не только внутренним (к примеру экологическим угрозам), но и внешним. Сейчас уже ясно что в межзвездном пространстве нашей Галактики находится большое количество опасных блуждающих тел, в том числе достаточно массивные планеты, способные даже при простом пролете сквозь нашу систему полностью ее разбалансировать, тем самым уничтожив высокоорганизованную жизнь на поверхности Земли.
Первым и логически оправданным шагом в решении столь гигантской задачи может стать проблема исследования и освоения ресурсов Марса, как наиболее достижимой и наименее затратной к освоению планеты.
Широкое исследование Марса как планеты земной группы представляет собой значительный научный и практический интерес. Такое исследование способно принести дополнительное знание о происхождении и эволюции объектов Солнечной системы, о возникновении и развитии жизни в Солнечной системе, а так же возможных способах ее распространения между планетами.
Практическим результатом массированного исследования Марса может стать получение сведений о возможно существующих и поныне в глубинах коры планеты микроорганизмах, их геноме, способе жизни, сходстве генома марсианских эндемичных бактерий с земными. На базе исследований о микробиологии Марса возможно получение новых видов белковых и иных структур, свойства которых могут оказаться полезными в условиях Земли. Полученные сведения автоматически войдут в копилку обобщенной базы знаний ИИ солнечной системы.
Другим результатом могут стать сведения о ресурсах Марса в контексте использования этой планеты как запасной базы обеспечивающей выживание человечества в случае земных катастроф непреодолимой силы. Например удар массивного блуждающего межзвездного астероида и т.п.
Выбор стратегии исследования Марса без присутствия человека на его поверхности обуславливается нежелательностью преждевременного заражения Марса биологическими компонентами присущими среде обитания человека, его внутренними симбиотами и типичными паразитическими микроорганизмами и вирусами. Отсутствие человека на поверхности Марса на первых этапах позволит обеспечить чистоту исследований, так как беспилотные аппараты могут быть стерилизованы с высокой степенью чистоты.
Решением проблемы отсутствия человека может стать размещение на орбите планеты тяжелой исследовательской станции, на борту которой будут находиться операторы, управляющие разнообразными группами роботов на её поверхности. На борту которой будет размещаться и постепенно наращиваться вычислительная платформа ИИ. находящаяся вне пределов Земли.
В этом контексте далее рассмотрены задачи по следующим направлениям:
- Выбор места размещения пилотируемой станции и условий ее функционирования. Описание орбитальной инфраструктуры связи и управления роботизированной группировкой на поверхности Марса .
- Определение основных требований к конструкции пилотируемой станции, организации ее снабжения и жизнеобеспечения, составу экипажа, требований к его формированию и продолжительности пребывания на станции.
- Формирование оценочного перечня предварительных мероприятий конструкторско-исследовательского характера в окрестностях Земли, на поверхности Луны и ближайших к Земле астероидах.
- Определены некоторые этапы миссии, окончательным результатом которой должна стать платформа ИИ в окрестностях Марса.
Затем, в контексте дальнейшего функционирования кластера ИИ уже в пределах Солнечной системы приводятся некоторые соображения о его энергетическом базисе.
Постановка проблемы и способ её решения
Доставка человека вместе с комплексами его жизнеобеспечения на Марс и последующая эвакуация экипажей с поверхности планеты требуют больших энергетических затрат и материальных ресурсов, а в эвакуации роботов нет никакой нужды.
Невозможно сделать человека и среду его обитания стерильными, поэтому даже простой выход космонавта в скафандре на поверхность планеты, пусть даже с исполнением сложного протокола обеззараживания в шлюзе, не дает гарантий того, что реголит Марса не будет заражен земными бактериями и вирусами, равно как и нет гарантий незаражения обитаемых объемов корабля или станции возможными марсианскими микроорганизмами, особенно если космонавты выполняли работы с достаточно глубокими слоями марсианского грунта.
Выполнение исследовательских работ при помощи роботов управляемых с Земли затруднено чрезмерно долгим прохождением управляющих и ответных сигналов. Время задержек составляет от 3 до 24 минут в зависимости от взаимного расположения планет на их орбитах. В случае если Солнце экранирует прохождение сигнала, то связь без системы межпланетной ретрансляции отсутствует полностью. В то же время на марсианских роботах невозможно поставить мощные высокоинтеллектуальные системы, требующие применения радиационно-уязвимой микроэлектроники. Радиационный фон Марса слишком велик, потому электроника требуется грубая, а значит тяжелая, объемная и энергоемкая. Следовательно самостоятельные сложные действия, требующие высокой оперативности принятия решений, роботы на поверхности планеты совершать не могут.
Решением проблемы могло бы стать создание на орбите в окрестностях Марса долговременной пилотируемой станции, на борту которой находились бы операторы управляющие роботами на поверхности Марса, размещались обслуживающий системы станции экипаж, и постепенно формировалась и наращивалась бортовая электроника ИИ.
Для обеспечения бесперебойного прохождения сигналов на орбитах планеты следует разместить спутниковую группировку ретрансляторов, в этом случае роботы находящиеся на поверхности планеты могут иметь минимальную электронику с минимальным интеллектом и представлять собой по сути аватары находящихся на станции операторов и бортового ИИ станции.
Перелет от Земли до Марса занимает 7-8 месяцев, поэтому экипаж станции не может сменяться слишком часто. При этом радиационная обстановка в окрестностях Марса хуже чем на его поверхности, так как поверхность планеты все же имеет некоторую защиту в виде разряженной атмосферы, следовательно станция нуждается в очень массивной противорадиационной защите, везти которую с Земли чрезвычайно накладно. Однако окрестности Марса располагают необходимыми ресурсами для создания противорадиационной защиты, это материал его спутников - Фобоса и Деймоса.
Размещение станции
С точки зрения оптимальности работы экипажа, исходя из времени задержки сигнала (станция - поверхность и обратно), а так же исходя из наличия необходимых материалов для создания противорадиационной защиты лучшим решением станет размещение станции на одном из полюсов дальнего спутника Марса - Деймоса. Либо, это возможно на орбите вокруг Деймоса (рисунок 1).
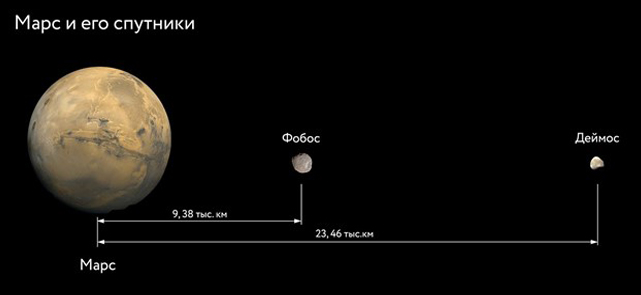
Рисунок 1 – Вариант размещения станции на Деймосе
Аргументы для такого выбора следующие:
- Деймос представляет собой небольшое неправильной формы астероидоподобное тело размерами 15 × 12,2 × 10,4 км. Спутник находится в гравитационно-приливном захвате и всегда обращен одной стороной к планете и следовательно удобно ориентирован.
- Деймос вращается вокруг Марса по почти круговой орбите , совершая полный оборот вокруг планеты и вокруг своей оси за 30,3 часа. Сутки на Марсе длятся 24 часа 39 минут. Таким образом на станции может быть реализован как вполне земной 24 часовой суточный ритм, так и 30 часовой, что по данным некоторых исследований вполне подходит для физиологии человека.
- Высота орбиты Деймоса составляет около 23500 км. Радиосигнал проходит это расстояние менее чем за десятую долю секунды. И даже если сигнал будут передавать спутники - ретрансляторы на противоположную от Деймоса сторону Марса, то время прохождения сигнала будет меньше одной секунды.
- На поверхности Деймоса находится очень важный ресурс - толстый слой реголита со средней плотностью 1470 кг на куб. метр. Предполагается, что он состоит в основном из соединений углерода и воды. Такой реголит вполне может быть использован как противорадиационная защита, если её слой составит 5, а лучше 10 метров. Реголит содержит воду, которая хорошо затормаживает протоны солнечного ветра и галактических лучей, вода необходима для нужд экипажа и может использоваться для генерации ракетного топлива.
- Слабая гравитация Деймоса позволит без больших затрат топлива сесть на его поверхность даже весьма массивной станции, и при необходимости позволит оторвать станцию от его поверхности и отправить ее в самостоятельный полет даже при наличии на борту тяжелой противорадиационной защиты созданной за счет местного реголита, так как вторая космическая скорость для Деймоса составляет всего 5,6 метров в секунду.
- В случае стационарного размещения станции на поверхности следует выбрать ее локацию на одном из полюсов Деймоса так как в этом случае станция всегда будет освещена Солнцем и солнечные батареи будут вырабатывать энергию круглосуточно. Если же использовать Деймос только как источник реголита станцию следует приземлить в районе экватора спутника, с тем чтобы центробежная сила вращения спутника и экваториальная скорость поверхности облегчили отрыв станции и её выход на орбиту вокруг Деймоса.
Единственным недостатком размещения станции на Деймосе или на его орбите является недоступность прямой связи с объектами находящимися на поверхности Марса на широтах превышающих 82,7°. Но, эта проблема может быть решена при помощи создании соответствующей полярной конфигурации орбитальной группировки спутников - ретрансляторов.
Вероятно лучшим для размещения станции станет северный полюс Деймоса, исходя из формы поверхности спутника (рисунок 2).
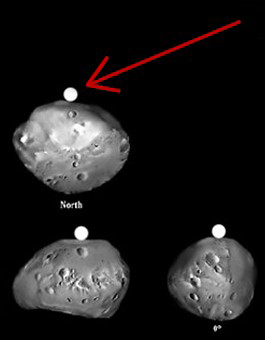
Рисунок 2 – Наиболее оптимальное размещение станции на Деймосе
Спутниковая группировка
Конфигурация орбитальной группировки спутников - ретрансляторов зависит прежде всего от широт на которых будут находится роботизированные группы, возможно даже роботизированные базы, или отдельные исследовательские устройства. В минимальном случае, когда на поверхности не будет высокоширотных роботизированных объектов хватит 2 - 3 спутников на той же орбите, что и Деймос. При среднем радиусе Марса 3389,5 км. высоты орбиты ретрансляторов в 23500 км достаточно для покрытия почти всей поверхности Марса кроме приполярных областей.
Приполярные области могут быть закрыты специальной группировкой ретрансляторов на невысоких полярных орбитах, в количестве от 3 до 6 в зависимости от высоты и формы орбиты (рисунок 3).
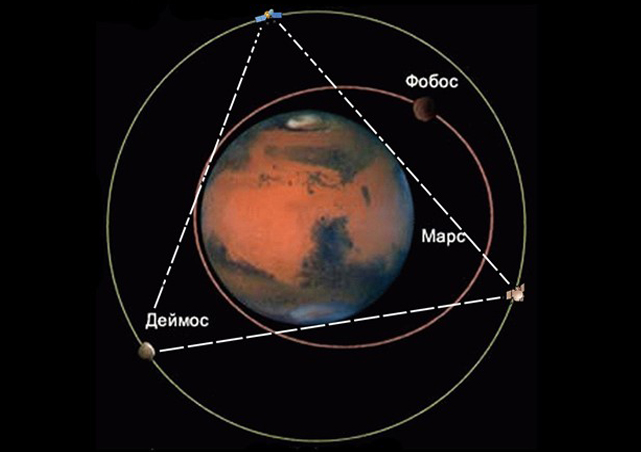
Рисунок 3 – Размещение ретрансляторов на невысоких полярных орбитах
Поскольку орбиты спутников будут нуждаться в корректировках из - за гравитационных влияний Солнца, Фобоса и Деймоса, неравномерности гравитационного поля Марса (а пребывание ретрансляторов на орбитах планируется продолжительным) их следует оснастить высокоимпульсными электроракетными двигателями и снабдить необходимым запасом рабочего тела. Кроме того возникает возможность ремонта спутников ретрансляторов силами экипажа станции. Марс по сравнению с Землей обладает меньшим гравитационным полем, поэтому меожорбитальные маневры требуют меньших импульсов и следовательно меньшего расхода рабочего тела. Для доставки спутников - ретрансляторов на станцию в целях их ремонта, обслуживания и дозаправки расходными компонентами может быть использован специальный робот – буксир.
Группировка автоматов на поверхности Марса
Основным выигрышем в безлюдном исследовании Марса является то обстоятельство, что робот не нуждается в сложных и массивных средствах обеспечения своего функционирования и не нуждается в эвакуации с поверхности планеты. Мало того, неисправные аппараты могут стать источником запасных частей для остающихся в строю, что ставит задачу стандартизации используемого оборудования.
На данный момент уже отработана доставка на Марс аппаратов достаточно большого веса (марсоход «Кьюриосити», вес около тонны) [2] с использованием аэродинамического торможения и ракетных кранов.
По нашему мнению наиболее перспективными являются группы аппаратов, состоящих из вертолетов – роботов, работающих на запасаемой солнечной энергии, способных захватывать и переносить с места на место наземные исследовательские комплексы, которые в этом случае не нуждаются в собственных средствах обеспечения высокой мобильности (рисунок 4).

Рисунок 4 – Вертолет-робот работающий на солнечной энергии
Применение групп подобных аппаратов способно обеспечить исследование вулканических марсианских провалов и содержимого их пещер. Например отверстие на склоне потухшего вулкана Гора Павлина (рисунок 5), провал в каньоне Гебы, провал Джинн и т. д. Именно провалы и пещеры на данный момент считаются наиболее перспективными местами для обнаружения бактериальной марсианской жизни.

Рисунок 5 – Отверстие на склоне потухшего вулкана.
Исходя из целей исследований у операторов станции будет большой объем работы по организации логистики исследований и их непосредственному проведению на марсианской поверхности при помощи управляемых ими автоматов.
Такими средствами может быть реализована не только программа исследования Марса, но и программа подготовки посещения Марса человеком. Операторы вместе с ИИ способны подготовить на поверхности планеты площадки посадки и старта, заглубленные и обвалованные искусственные сооружения, обеспечивающие противорадиационную защиту экипажу будущей марсианской пилотируемой миссии. Возникает возможность под контролем и управлением операторов станции и бортового ИИ производить на Марсе топливо для возвращения космонавтов на орбиту Марса. Для этого имеются все необходимые ресурсы: углекислый газ атмосферы, водяной лед и солнечная энергия. Подобные проекты генерации топлива на месте уже имеются, но они подразумевали полностью автоматическую работу установок и контроль с Земли.
В дальнейшем , на базе накопленных ИИ знаний и навыков, возможно создание в поясе астероидов полностью безлюдных, связанных роботизированной логистикой автоматизированных, самоподдерживающихся станций с собственным материальным производством и комплексом обслуживания и ремонта.
Обеспечение миссии
Пребывание космонавтов в далеком от нашей планеты космосе с учетом времени полета к Марсу и обратной дороги к Земле, с учетом времени работы экипажа на станции и ожиданием благоприятных окон старта может составить до 3 лет.
В условиях столь длительной космической командировки перед экипажами возникнут многие проблемы, самые главные из них следующие:
- накопленная доза радиации;
- отрицательное влияние невесомости;
- жизнеобеспечение и экологический комфорт;
- психологический климат в условиях пребывания в ограниченном пространстве.
Конструкция станции
Конструкция станции должна быть такой, чтобы в максимальной степени снизить отрицательное влияние перечисленных ранее факторов.
Поэтому был выбран сферический объем диаметром 84 метров как наиболее оптимальный с точки зрения соотношения между площадью поверхности и вмещаемым объемом (рисунок 6). Сфера выполняется двухстенной, между стенками по прибытии станции на Деймос засыпается 6 метров реголита. Для этого используются автоматы - сборщики реголита и система его подачи в межстеночный объем.
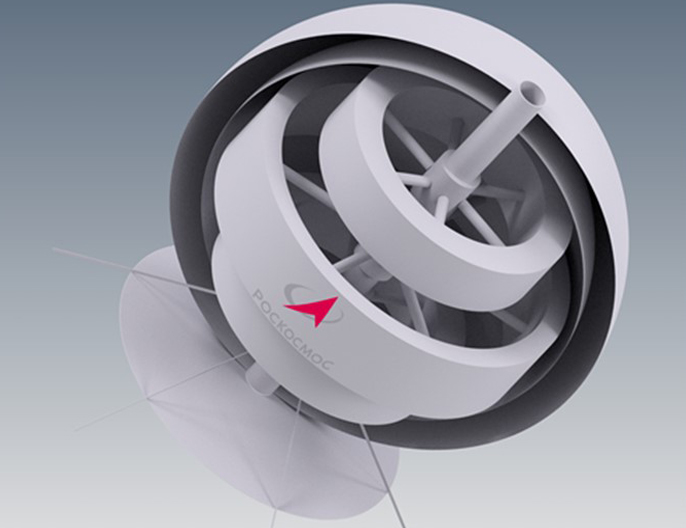
Рисунок 6 – Оптимальная конструкция станции в виде сферы
Диаметр внутренней герметичной сферы составляет 72 м. Общая масса радиационной защиты после её заполнения реголитом составит по расчетам 169028 тонн.
Внутри сферического объема размещаются крупногабаритные центрифуги обеспечивающие экипажу среду обитания и земную гравитацию за счет центробежных сил. Из соображений гравитационного комфорта разницу в центробежном ускорении на уровне ступней ног и головы члена экипажа выбрана 5 %. При этом желательно чтобы члены экипажа были людьми невысокого роста - около 1,64 м.
Исходя из принятых условий диаметр главной экваториальной центрифуги составил 66 метров, размер полости конструкции центрифуги в поперечном направлении составляет около 20 метров, Таким образом общая жилая и служебная поверхность с нормальной гравитацией может составить свыше 3300 м2. Угловая скорость центрифуги около 0,55 радиан в секунду, скорость движения периферийных конструкций центрифуги относительно внутреннего сферического корпуса станции составит около 70 км/час. Размеры выбираются так, чтобы между краями центрифуги и внутренней сферой оставалось пространство, которое требуется для доступа к внутренней поверхности станции в случае необходимости устранения возможных утечек воздуха. Главная экваториальная центрифуга представляет собой помещения в которых экипаж проводит основное рабочее время, занимается спортом и отдыхает. Там же располагаются зоны психологической разрядки и экологического комфорта снабженные зеленой растительностью и возможно декоративными животными (аквариумные рыбки, певчие птицы и т.п). Кроме функции психологической разрядки декоративные животные выполняют роль индикатора благополучия экологически замкнутой среды обитания.
Две дополнительные центрифуги, размещенные на одной и той же оси вращаются в противоположную сторону и служат для компенсации вращательного движения главной центрифуги. При одновременном раскручивании всех центрифуг корпус станции не испытывает вращательных моментов и остается неподвижным. В этих вращающихся конструкциях находятся помещения в которых выращиваются растительные и возможно животные продукты питания. В этих центрифугах поддерживается пониженная гравитация. Их диаметр составляет 47 м, общая полезная площадь служебных центрифуг может составить свыше 3500 м2.
Как показывают расчеты геометрическая сумма векторов центробежной силы и силы гравитации Деймоса дает отклонение от вектора центробежной силы в 0,022°, что пренебрежимо мало. Поэтому поверхность полов может выполняться перпендикулярной радиусам центрифуг.
Для устранения неравномерности распределения массы по объему центрифуг и устранения вызванных ими биений на несущих центрифуги подшипниках, связанных в перемещением людей и грузов, следует предусмотреть жидкостную систему компенсации, представляющую собой совокупность трубопроводов и снабженных мембранным разделителем баков, в которые будет перекачиваться жидкость, тем самым компенсируя в реальном режиме времени изменения в распределении массы по периметру центрифуг.
Внутри герметичного сферического пространства станции поддерживается пониженное атмосферное давление - около 0,05 атмосферного, что позволяет сделать внутреннюю стенку более тонкой и снижает энергетические расходы на преодоление сопротивления воздуха вращающимися поверхностями центрифуг. Внутри обитаемых полостей центрифуг поддерживается нормальное давление 1 атмосфера.
Свободное от центрифуг внутренне пространство отводится под оборудование связи и жизнеобеспечения станции. К этому оборудованию обеспечивается доступ в условиях микрогравитации Деймоса или невесомости.
Просочившийся из центрифуг воздух попадает во внутренний герметичный объем станции и средствами жизнеобеспечения снова под давлением 1 атмосфера подается во внутренние объемы центрифуг.
Психологическая совместимость
Психологическая совместимость членов экипажа крайне важна в условиях длительной изоляции, опасности пребывания в космическом пространстве, а так же в условиях удаленности от Земли. Это важное условие успеха миссии.
Особенностью работы на станции является нагрузка связанная с операторской деятельностью в вариативных и не всегда предсказуемых условиях ее выполнения. Проведенные исследования показали [1], что с такой работой лучше справляются мужчины. При этом женщины лучше справляются с предсказуемой деятельностью, требующей тщательности.
Поэтому предлагается станцию комплектовать семейными парами зрелого возраста около 40 лет, бездетными или имеющими совершеннолетних детей или достаточно взрослых в возрасте близком к совершеннолетию. При этом дети остаются на Земле на попечении родственников.
Общая численность членов экипажа может составить 18-24 человек, при необходимости больше. При круглосуточном режиме работы в смену может входить 2-3 оператора выполняющих программу исследований Марса по командам Центра управления на Земле. Остальной состав смены это персонал обслуживающий технологические нужды станции и состояние экипажа, например врач (он же биолог, растениевод, животновод), повар - технолог, инженер - космонавт и т. п. Поскольку продукты питания выращиваются на станции их приготовление и утилизация отходов в замкнутом экологическом цикле требует заметного рабочего времени поэтому должности повара — технолога, биолога и инженера необходимы. Вся рабочая деятельность экипажа находится под контролем бортового ИИ, в целях накопления им опыта обеспечения обитаемости, его хранения и передачи для дальнейшего использования в последующих проектах подобного типа.
При наличии трех смен возникает ресурс корректировки психологического климата путем перехода членов экипажа из одной смены в другую, что создает элемент новизны в командной работе смены.
Проведенные на данный момент эксперименты и исследования по психологической совместимости в длительной изоляции небольших групп показали, что в экипаж должны подбираться уравновешенные, доброжелательные люди склонные к добродушному юмору [3].
Снабжение и смена экипажей
Станция прибывает на Деймос в автоматическом режиме, без радиационной защиты, которая позже формируется на месте с использованием роботов - сборщиков реголита. После создания радиационной защиты станция ожидает первую смену экипажа и к её прибытию центрифуги раскручиваются.
Станция будет предоставлять комфортные условия для жизни людей и функционирования аппаратуры ИИ и должна обладать многолетним ресурсом. Цикл жизнеобеспечения станции должен быть замкнут с высоким совершенством.
На текущем этапе исследований пока не удается создать полностью замкнутую искусственную экологическую систему. Эксперименты показали, что в искусственных системах со временем накапливаются вредные вещества, прежде всего изменяется состав атмосферы. В почвенных субстратах такие вредные вещества тоже накапливаются. Однако реголит Деймоса является ресурсом для получения как минимум углерода, кислорода и водорода. Эти вещества могут оптимальным образом вводиться в экологический оборот станции. Тем самым может хотя бы частично обновляться газовая среда и почвенные субстраты.
Особая проблема - изменение микробного состава в обитаемых объемах. С этой проблемой уже сталкиваются экипажи современных космических станций. Вероятно тут потребуются методы высокотемпературного или лучевого обеззараживания используемых сред с последующим введением новых порций нормальной биоты, которую придется доставлять с Земли в виде растворов, спор и т. д.
Со временем будут изнашиваться и заменяться некоторые расходные материалы и механизмы, обеспечивающие работу станции.
Расходные материалы и ЗИП могу доставляться как с очередной сменой, так и самостоятельными беспилотными кораблями.
В относительно комфортных условиях станции очередная смена экипажа может находится достаточно долго, вероятно от полутора лет до 3 лет. С учетом полета к Деймосу и обратно к Земле вся командировка может занять 3-5 лет.
Станция станет важным этапом по отработке экологических замкнутых систем жизнеобеспечения в условиях далекого космоса. При помощи такого опыта со временем удастся создать обитаемую базу на самом Марсе. А так же командные базы на объектах пояса астероидов.
Со временем (по мере доставки на станцию в защищенных от радиации контейнерах микроэлектроники) на борту следует сформировать мощный вычислительный центр , который должен стать вместилищем искусственного интеллекта (ИИ), обучающегося на действиях людей - операторов. Электроника этого центра будет защищена противорадиационной оболочкой станции, элементами её конструкции и массой Деймоса, тем самым исключается опасность её быстрой деградации. Со временем это позволит минимизировать, а потом и полностью исключить присутствие человека на этой и иных подобных станциях. Обучение ИИ будет основано на сопоставлении сенсорной и визуальной информации предоставляемой аватаром и работой оператора решающего текущую задачу посредством конкретного робота-аватара.
Подготовка и этапы миссии
Приближенные оценки говорят о том, что общая реалистичная масса станции может составить от 8 до 20 тысяч тонн, это без учета создаваемой на месте противорадиационной защиты и ракетно-транспортной части, обеспечивающей транспортировку станции от Земли к Деймосу.
Для доставки станции следует использовать межпланетный ракетный буксир. Буксир - отдельный стыкуемый к станции объект. Он не может быть создан на основе традиционных химических ракетных двигателей, работать он должен на электроракетной тяге. Энергия необходимая для работы двигателей обеспечивается или солнечными панелями, или ядерной энергетической установкой. При этом заботиться о радиационной безопасности экипажа нет необходимости, так как доставка станции к Деймосу или на перспективные к исследованиям астероиды на электроракетной тяге может занять несколько лет и поэтому буксировка проводится в автоматическом режиме.
После доставки станции на орбиту вокруг Деймоса буксир отстыковывается и затем используюется для выполнения программы последующих исследований Солнечной системы и создания распределенного по Солнечной системе искусственного интеллекта. Дальнейшая работа буксира может состоять в буксировке грузов и топлива от окрестностей Земли к Марсу и между аналогичными станциями на астероидах. Рабочими телами для электроракетных двигателей буксира могут быть ртуть или цезий, в окрестностях Земли на её низких орбитах — аргон или ксенон [4]. Поэтому одной из актуальных задач является организация добычи рабочего тела на астероидах или малых спутниках планет.
Создание конструкции станции
Станция собирается на орбите Земли, высота которой характерна для пилотируемых орбитальных миссий. Это высоты порядка 400 км. Сборка конструкции начинается с полой сборной оси - хорды, на которую позже монтируются кольцевые подшипники служащие основой для сборки рамы центрифуг, силовой каркас устройства посадки и основу каркаса оболочек. Отсеки центрифуг вероятнее всего целесообразно собирать не тороидальными как это показано на рисунке 6, а из более технологичных цилиндрических объемов хорошо освоенных ракетостроительной отраслью. Цилиндрические отсеки достаточно просто выводить на орбиту под обтекателями ракет, или даже совсем без обтекателей, это зависит от их конкретной формы. Доставка на орбиту разобранных конструкций силовых ферм тоже не представляет особых трудностей.
После сборки центрифуг их наполняют, дооснащают и используют как жилые и производственные объемы.
Механизмами раскрутки центрифуги приводятся в разнонаправленное вращательное движение с тем чтобы моменты от центрифуг уравновешивались. На этом этапе проводится проверка качества сборки центрифуг и механизмов компенсации возмущений. После этого объемы центрифуг могут быть использованы как комфортная околоземная станция (рисунок 7).
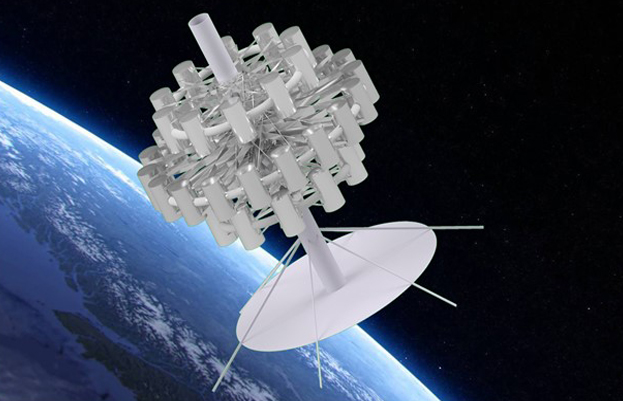
Рисунок 7 – Конструкция станции собранной на орбите Земли
На следующем этапе начинается создание и отработка системы замкнутого жизнеобеспечения.
В это же время производят монтаж сферических оболочек. Оболочки создаются из профилированных шестигранных сегментов, которые могут быть размещены стопкой под обтекатель диаметром 6-7 метров. Таким образом защитные сферы собираются вокруг уже использующихся центрифуг. В этот период отрабатывается управление роботами - аватарами, которые используются в процессе монтажа внешней оболочки станции.
Технологии сборки станции и буксира подразумевают использование управляемых механических рук, для соединения элементов конструкции в космосе используются уже отработанные технологии: болтовые прочноплотные и сварные, получаемые методом электронно- лучевой сварки.
Изложенные тут этапы могут занять 5-10 лет и по нашим оценкам и потребуют от 280 до 500 запусков ракет носителей типа «Ангара-А5В» грузоподъемность 38 тонн. Однако поскольку такой проект потребует международного сотрудничества, то для его реализации вполне разумно использовать и более мощные ракеты носители, например американский носитель SLS с массой полезной нагрузки 95-130 тонн.
Околоземная отработка обитаемости и буксировки
Далее в течение как минимум 3 лет происходит отработка систем замкнутого жизнеобеспечения. Проверяются параметры газового состава, состава почв или сред гидропоники, пригодность конструкционных и иных материалов к длительному использованию. Проверяются накопительные вредоносные эффекты любой природы и проводятся мероприятия по их устранению или купированию приемлемыми для дальнего космоса средствами.
В этот же период на орбите Земли и в окрестностях станции, либо в условиях непосредственной стыковки собирается космический буксир. На данном этапе оценить массу буксира достаточно сложно так как она сильно зависит от типа энергоустановки и удельного импульса электроракетных двигателей.
Обкатывается совместная работа систем управления буксира и станции. При помощи временных химических двигателей станция испытывается небольшими тестовыми ускорениями, в это же время проверяется работа устройств и механизмов станции и буксира.
Транспортировка
Перед началом перелета со станции снимаются все биологические объекты, центрифуги останавливаются, эвакуируется экипаж, её масса доводится до минимума.
Доставка станции к Деймосу представляет собой достаточно сложную транспортную операцию. Независимо от того на каком типе энергообеспечения будет работать буксир, он не сможет создавать больших ускорений. Поэтому набор скорости связкой станция - буксир будет достаточно долгим. Связка будет постепенно набирать скорость находясь на все более вытянутой эллиптической орбите Земли. При этом гравитация и масса Луны могут быть использованы в качестве своеобразной катапульты.
Далее, уже в межпланетном пространстве, небольшие ускорения от электроракетных двигателей буксира могут использоваться для постепенного разгона станции и её торможения в окрестностях Марса . Все маневры могут занять несколько лет, возможно более 10.
На орбите вокруг Деймоса буксир отстыковывается чтобы затем принять участие в дальнейших грузовых миссиях. Впоследствии буксир становится частью долговременной транспортной инфраструктуры человечества в Солнечной системе.
Станция садится на полюс Деймоса используя собственные запасы химического топлива и тягу своих ракетных двигателей. При этом необходимый расход топлива могу составить от 15 до 40 тонн в зависимости от массы конструкции станции.
Для успешного осуществления исследовательской миссии станции, начиная с момента принятия программы её создания, следует формировать на поверхности Марса группы роботов - аватаров, которые будут находится на поверхности планеты в законсервированном состоянии.
Они будут расконсервированы и приступят к работе по прибытии на Деймос первой смены операторов.
Механизм отрыва от астероида
В некоторых случаях может возникнуть необходимость отрыва уже функционирующей и полностью оснащенной станции от поверхности Деймоса для её передислокации в другую точку поверхности или для выполнения самостоятельного полета в космосе. Так как оболочка станции будет заполнена реголитом, а сама она будет полностью оснащена, то её масса может составить до 190 тысяч тонн. В этом случае для выхода станции из под влияния гравитации Деймоса может потребоваться до 350 тонн химического топлива.
В целях экономии топлива и расходуемых масс авторами для осуществления такого рода операций предлагается использовать надувную герметичную конструкцию, способную оттолкнуть станцию с необходимой скоростью и небольшим ускорением от Деймоса (рисунок 8).
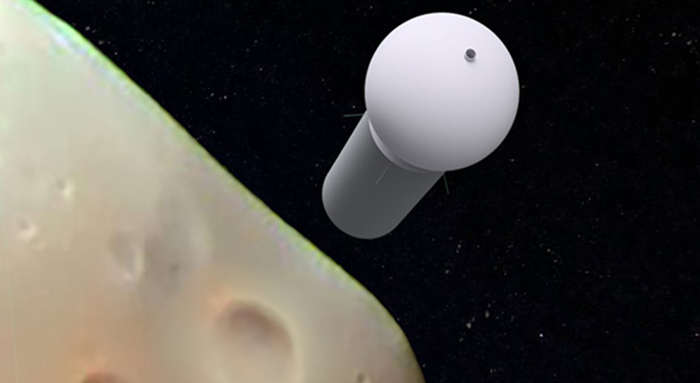
Рисунок 8 – Конструкция для отрыва станции от поверхности Деймоса
Надувная конструкция будет заполняться горячим водяным паром при давлении около 0,2 атмосферы. Расправляясь конструкция оттолкнет станцию от Деймоса с ускорением около 0,15 м/сек2 . Далее надувной баллон может использоваться как подушка гашения скорости при посадке в другом районе Деймоса для чего давление в баллоне должно регулироваться, а масса пара сбрасываться наружу. Оценочные расчеты говорят, что для отталкивания от Деймоса придется использовать около 22 тонн водяного пара, который может быть получен путем сжигания около пяти тонн окислителя и топлива. Итого общие затраты составят около 30 тонн расходуемой массы против 350 в чисто ракетном варианте. При этом при наличии в реголите Деймоса воды топливо и пар являются возобновляемым ресурсом, конечно при условии что станция будет располагать технологией добычи воды из реголита.
Энергетика кластера ИИ солнечной системы
Элементы кластера ИИ солнечной системы могут базироваться не только на близких к Солнцу каменистых планетах (Меркурий, Земля, Марс) и астероидах, они могут располагаться на ледяных спутниках планет -гигантов, на кометах и планетоидах типа Плутона. Если радиационная защита и связь не представляют собой фундаментальной проблемы, то о энергоснабжении периферийных элементов этого сказать нельзя.
Несомненно лучшим решением стало бы использование термоядерной энергии, так как на отдаленной периферии достаточно водорода в составе замерзшей воды, соединений углерода и азота. Однако технология управляемой добычи термоядерной энергии из водорода все еще отсутствует и перспективы все еще крайне туманны, несмотря колоссальные более полувековые исследования и на некоторые внушающие слабые надежды успехи последних лет в этой области. Поэтому наиболее реалистичным способом снабжения периферийных элементов кластера ИИ энергией следует считать обеспечение этих элементов кластера делящимися материалами. Это могут быть как непосредственно добываемые на планетах солнечной системы материалы: прежде всего изотопы урана, так и нарабатываемые на ускорителях долгоживущие изотопы, которые потом следует доставлять к периферийным объектам специальными транспортными кораблями. Очевидно что такие ускорители должны работать на низкомассивных объектах Солнечной системы за счет солнечной энергии. Доставка делящихся материалов к реакторам на отдаленных объектах Солнечной системы может занимать десятки лет. Но продолжительность жизни кластера ИИ ничем не ограничена, поэтому для кластера продолжительность передачи информации и грузовых перелетов не является решающим фактором. Таким образом в солнечной системе (при должном вложении ресурсов) может возникнуть самодостаточная интеллектуальная распределенная система сохранения, умножения и наработки информации, созданной как биологическими разумными существами - человечеством, так и будущим машинным разумом.
Заключение
Потенциал Марса как вместилища разумной жизни может составить несколько миллионов лет, и этот временной интервал может быть увеличен если человечество освоит ресурсы пояса астероидов, где есть необходимые запасы воды, металлов, углерода и азота, которые могут быть предварительно доставлены на поверхность Марса.
Целью исследования является обоснование возможности разработки реалистичной научно обоснованной программы по созданию искусственного интеллекта Солнечной системы, начиная с массированного исследования и первичного освоения Марса при помощи долговременной станции, базирующейся на спутнике Марса - Деймосе, или на орбите вокруг Марса, а так же мощного межпланетного буксира с большим ресурсом использования.
Можно сделать выводы о наличии принципиальных технически и иных возможностей решить поставленную задачу по созданию распределенного и долгоживущего ИИ космического базирования целью существования которого станет освоение ресурсов Солнечной систем человечеством.
В перспективе может оказаться что освоение ресурсной базы астероидов, комет, планетоидов с помощью наработанного на таких станциях искусственного интеллекта представляет собой более выгодное занятие чем непосредственные вложения в быстрое освоение ресурсов Луны, так как передача любой массы с Луны на Землю требует ощутимых затрат ракетного топлива, ибо вторая космическая скорость для Луны составляет 2375 м/сек. Если отправлять контейнеры с обогащенными на месте грузами в адрес Земли или Марса с поверхности астероидов, то им придется сообщать скорость порядка десятка метров в секунду. Для астероидов, орбиты которых сильно вытянуты и близки к орбите Земли, последующая корректировка траектории контейнера с грузом потребует изменений скорости которые тоже не слишком велики, особенно с учетом возможности гравитационных маневров в областях притяжения планет. Такого же рода необходимые изменения скорости будут характерны и для грузов отправляемых с периферийных комет и астероидов, движущихся по круговым и эллиптическим орбитам на задворках Солнечной системы. Поэтому в перспективе их ресурсы становятся вполне достижимыми для будущих колоний Марса и населения Земли, несмотря на то что каждый такой груз может доставлять весьма продолжительное время, включительно до десятков лет, что не является критичным в масштабах жизни цивилизации и искусственного интеллекта, время жизни которого трудно представить ограниченным.
Создание такой самоподдерживающейся системы в рамках околосолнечного пространства определит развитие человечества на сотни и даже тысячи лет, а в случае его угасания оставит бесконечно долго живущего приемника, хранящего память о жизни на Земле и способного к саморазвитию.
Общий вывод: наша цивилизация обладает техническим и технологическим потенциалом для решения поставленной наукоемкой задачи.
Список используемой литературы
1. Еськов, К. Н. Взаимосвязанная операторская деятельность изолированной малой группы (методика Гомеостат) : специальность 14.03.08 «Авиационная, космическая и морская медицина» : диссертация на соискание ученой степени кандидата биологических наук / Еськов Константин Николаевич, 2019. – 148 с. – EDN ELIBMP.
2. Страшно любопытно: что внутри марсохода Curiosity // Технологии. Космос. URL: https://www.techinsider.ru/technologies/604703-strashno-lyubopytno-chto-vnutri-marsohoda-curiosity/ (дата обращения: 19.11.2023).
3. Как сформировать психологически совместимый экипаж // Электронная библиотека sci-book.com. URL: https://sci-book.com/psihologiya-stressa/kak-sformirovat-psihologicheski-sovmestimyiy-80858.html (дата обращения: 19.11.2023).
4. Салмин В. В. Расчет проектно-баллистических характеристик и формирование проектного облика межорбитальных транспортных аппаратов с электрореактивной двигательной установкой с использованием информационных технологий. - Самара: Изд-во Самарского университета, 2019. - 196 c.
Информация об авторах
Билецкая С. Н. – студент группы ДО-21 КГБ ПОУ «Ванинский межотраслевой колледж (Центр подготовки кадров)», РФ, Хабаровский край, п. Ванино.
Пелипенко Р. А. – студент группы ИУ-33 МГТУ им. Н.Э. Баумана, РФ, г. Москва.
Ссылка для цитирования
Билецкая, С. Н. Стратегия создания искусственного интеллекта для освоения солнечной системы / С. Н. Билецкая, Р. А. Пелипенко // Энерджинет. 2023. № 1. URL: http://nopak.ru/231-709 (дата обращения: 25.11.2023).
![]()